Class AgentParam contains agent and algoritms parameters.
More...
#include <Agent.h>
Class AgentParam contains agent and algoritms parameters.
Definition at line 38 of file Agent.h.
| AgentParam::AgentParam |
( |
| ) |
|
|
inline |
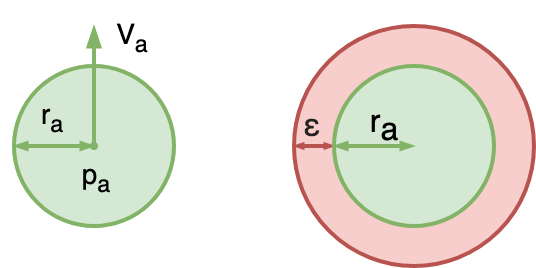
AgentParam default constructor.
All parametes will be initialized with default values from Const.h file. An illustration of the agent is presented in the figure below.
Definition at line 51 of file Agent.h.
| AgentParam::AgentParam |
( |
float |
sr, |
|
|
float |
tb, |
|
|
float |
tbo, |
|
|
float |
r, |
|
|
float |
reps, |
|
|
float |
ms, |
|
|
int |
amn |
|
) |
| |
|
inline |
AgentParam constructor with parameters.
- Parameters
-
| sr | Radius in which the agent takes neighbors into account. |
| tb | Time within which ORCA algorithm ensures collision avoidance with neighbor agents. |
| tbo | Time within which ORCA algorithm ensures collision avoidance with neighbor obstacles. |
| r | Size of the agent (radius of the agent). |
| reps | Buffer size (more about buffer see Main page). |
| ms | Maximum speed of agent. |
| amn | Number of neighbors, that the agent takes into account. |
Definition at line 64 of file Agent.h.
| AgentParam::~AgentParam |
( |
| ) |
|
|
default |
| int AgentParam::agentsMaxNum |
Number of neighbors, that the agent takes into account.
Definition at line 78 of file Agent.h.
| float AgentParam::maxSpeed |
Maximum speed of agent.
Definition at line 77 of file Agent.h.
Size of the agent (radius of the agent).
Definition at line 75 of file Agent.h.
| float AgentParam::sightRadius |
Radius in which the agent takes neighbors into account.
Definition at line 72 of file Agent.h.
| float AgentParam::timeBoundary |
Time within which ORCA algorithm ensures collision avoidance with neighbor agents.
Definition at line 73 of file Agent.h.
| float AgentParam::timeBoundaryObst |
Time within which ORCA algorithm ensures collision avoidance with neighbor obstacles.
Definition at line 74 of file Agent.h.
The documentation for this class was generated from the following file: