Class Summary contains brief information about execution results. More...
#include <Summary.h>
Public Member Functions | |
| Summary ()=default | |
| Default constructor. More... | |
| Summary (float srate, float runtime, float flowtime, float makespan, int collisions, int collisionsObst) | |
| Constructor with parameters. More... | |
| Summary (const Summary &obj) | |
| Copy constructor. More... | |
| std::string | ToString () const |
| Creates STL string, which contains all values splitted with tabulation. More... | |
| ~Summary ()=default | |
| Default destructor. More... | |
Public Attributes | |
| int | collisions |
| Shows the number of collisions between agents while execution of task. More... | |
| int | collisionsObst |
| Shows the number of collisions between agents and static obstacles while execution of task. More... | |
| float | flowTime |
| Shows the sum of time steps of all agents. More... | |
| float | makeSpan |
| Shows the maximum value of time steps of amoung all agents. More... | |
| float | runTime |
| Shows the time of running of task. More... | |
| float | successRate |
| Shows the percent of agents, which succsed their tasks. More... | |
Detailed Description
Class Summary contains brief information about execution results.
Summary includes following values:
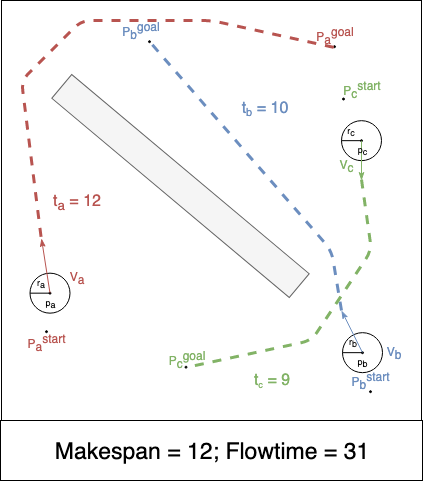
Success Rate— shows the percent of agents, which succeed their tasks;Runtime— shows the time of running of task;Flowtime— shows the sum of steps of all agents;Makespan— shows the maximum value of steps of amoung all agents;Collisions (agents)— shows the number of collisions between agents while execution of task;Collisions (obstacles)— shows the number of collisions between agents and static obstacles while execution of task;
An illustration of the flowtime and makespan is presented in the figure below.
Constructor & Destructor Documentation
|
default |
Default constructor.
|
default |
Default destructor.
|
inline |
Constructor with parameters.
- Parameters
-
srate The percent of agents, which succsed their tasks. runtime The time of running of a task. flowtime The sum of time steps of all agents. makespan The maximum value of time steps of amoung all agents. collisions The number of collisions between agents while execution of task. collisionsObst The number of collisions between agents and static obstacles while execution of task.
|
inline |
Member Function Documentation
|
inline |
Member Data Documentation
| int Summary::collisions |
| int Summary::collisionsObst |
| float Summary::flowTime |
| float Summary::makeSpan |
| float Summary::successRate |
The documentation for this class was generated from the following file: