ORCAAgent class implements agent with ORCA algoritm behavior. More...
#include <ORCAAgent.h>
Public Member Functions | |
| void | ApplyNewVelocity () override |
| Method for state updating and appling computed velocity. More... | |
| ORCAAgent * | Clone () const override |
| Method for cloning objects. Creates copy of object in memmory and return pointer to copy. More... | |
| void | ComputeNewVelocity () override |
| Computes new velocity of agent using ORCA algorithm and linear programing. More... | |
| bool | operator!= (const ORCAAgent &another) const |
| Comparisons operator. Compares id of agents. More... | |
| ORCAAgent & | operator= (const ORCAAgent &obj) |
| Assignment operator. More... | |
| bool | operator== (const ORCAAgent &another) const |
| Comparisons operator. Compares id of agents. More... | |
| ORCAAgent () | |
| ORCAAgent default constructor. More... | |
| ORCAAgent (const int &id, const Point &start, const Point &goal, const Map &map, const EnvironmentOptions &options, AgentParam param) | |
| ORCAAgent constructor with parameters. More... | |
| ORCAAgent (const ORCAAgent &obj) | |
| ORCAAgent copy constructor. More... | |
| bool | UpdatePrefVelocity () override |
| Method for computing preffered velocity and chosing current goal from global path. More... | |
| ~ORCAAgent () | |
| Virtual destructor. More... | |
 Public Member Functions inherited from Agent Public Member Functions inherited from Agent | |
| virtual void | AddNeighbour (Agent &neighbour, float distSq) |
| Adds new neighbour. Only agents inside sight radius will be adeed. Can be ovveriden. More... | |
| Agent () | |
| Agent default constructor. More... | |
| Agent (const int &id, const Point &start, const Point &goal, const Map &map, const EnvironmentOptions &options, AgentParam param) | |
| Agent constructor with parameters. More... | |
| Agent (const Agent &obj) | |
| Agent copy constructor. More... | |
| std::pair< unsigned int, unsigned int > | GetCollision () const |
| Returns collisions count. For debug purposes. More... | |
| Point | GetGoal () const |
| Returns goal of agent. For ROS Simulation purposes. More... | |
| int | GetID () const |
| Returns identifier of agent. More... | |
| Point | GetNext () const |
| Returns current goal of agent. For debug purposes. More... | |
| AgentParam | GetParam () const |
| Returns parameters of agent. For ROS Simulation purposes. More... | |
| Point | GetPosition () const |
| Returns current position of Agent. More... | |
| float | GetRadius () const |
| Returns radius of agent. More... | |
| Point | GetStart () const |
| Returns start of agent. For ROS Simulation purposes. More... | |
| Point | GetVelocity () const |
| Returns current velocity of agent. More... | |
| bool | InitPath () |
| Starts pathfinding from start to goal position. More... | |
| virtual bool | isFinished () |
| Checks, what the agent is on finish. To achieve finish agent should be at least in delta distance from goal position. More... | |
| bool | operator!= (const Agent &another) const |
| Comparisons operator. Compares id of agents. More... | |
| Agent & | operator= (const Agent &obj) |
| Assignment operator. More... | |
| bool | operator== (const Agent &another) const |
| Comparisons operator. Compares id of agents. More... | |
| template<class Planner > | |
| void | SetPlanner (const Planner &pl) |
| Set global planner object. More... | |
| virtual void | SetPosition (const Point &pos) |
| SetsS current position of agent. Can be ovveriden. More... | |
| virtual void | SetVelocity (const Point &vel) |
| Sets current velocity. Should be used if the new velocity may not coincide with the computed. More... | |
| void | UpdateNeighbourObst () |
| Computes neighbouring obstacles. More... | |
| virtual | ~Agent () |
| Virtual destructor. More... | |
Detailed Description
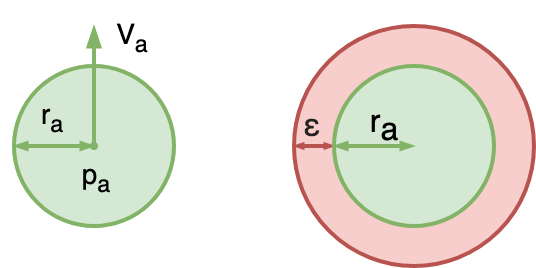
ORCAAgent class implements agent with ORCA algoritm behavior.
This class describes the interaction interface with the navigation algorithm. This class implements a collision avoidance algorithm ORCA the interaction between ORCA and path planner.
An illustration of the agent is presented in the figure below.
Definition at line 26 of file ORCAAgent.h.
Constructor & Destructor Documentation
| ORCAAgent::ORCAAgent | ( | ) |
ORCAAgent default constructor.
Definition at line 9 of file ORCAAgent.cpp.
| ORCAAgent::ORCAAgent | ( | const int & | id, |
| const Point & | start, | ||
| const Point & | goal, | ||
| const Map & | map, | ||
| const EnvironmentOptions & | options, | ||
| AgentParam | param | ||
| ) |
ORCAAgent constructor with parameters.
- Parameters
-
id Agent identifier number for debug and comparison. start Start position of agent. goal Goal position of agent. map Static environment map. It contains information about grid and static obstacles boundaries. More about it see in Main page and Map class. options Environment and algorithm options. See EnvironmentOptions class. param agent and algorithm options. See AgentParam class.
Definition at line 12 of file ORCAAgent.cpp.
| ORCAAgent::ORCAAgent | ( | const ORCAAgent & | obj | ) |
ORCAAgent copy constructor.
- Parameters
-
obj ORCAAgent object to copy.
Definition at line 17 of file ORCAAgent.cpp.
|
default |
Virtual destructor.
Member Function Documentation
|
overridevirtual |
Method for state updating and appling computed velocity.
Implements Agent.
Definition at line 332 of file ORCAAgent.cpp.
|
overridevirtual |
Method for cloning objects. Creates copy of object in memmory and return pointer to copy.
- Returns
- Pointer to copy of object
Implements Agent.
Definition at line 384 of file ORCAAgent.cpp.
|
overridevirtual |
Computes new velocity of agent using ORCA algorithm and linear programing.
Implements Agent.
Definition at line 23 of file ORCAAgent.cpp.
| bool ORCAAgent::operator!= | ( | const ORCAAgent & | another | ) | const |
Comparisons operator. Compares id of agents.
- Parameters
-
another ORCAAgent to compare.
- Returns
- Inequality of this and another identifiers.
Definition at line 379 of file ORCAAgent.cpp.
Assignment operator.
- Parameters
-
obj ORCAAgent to assignment.
- Returns
- Reference to agent.
Definition at line 363 of file ORCAAgent.cpp.
| bool ORCAAgent::operator== | ( | const ORCAAgent & | another | ) | const |
Comparisons operator. Compares id of agents.
- Parameters
-
another ORCAAgent to compare.
- Returns
- equality of this and another identifiers.
Definition at line 374 of file ORCAAgent.cpp.
|
overridevirtual |
Method for computing preffered velocity and chosing current goal from global path.
- Returns
- Success of finding new current goal.
Implements Agent.
Definition at line 338 of file ORCAAgent.cpp.
The documentation for this class was generated from the following files: